11. Gripper handling
11.1. Three placement strategies
This chapter introduces three placement strategies available in the system. They differ in the complexity of robot movements and in the types of surfaces and tool shapes they support.
The available strategies are:
Direct placement — a single contact point
Rolling placement contact points — continuous contact along the surface
Separate placement contact points — multiple approach-contact-leaving movements for a single patch
The chapter ends with a short comparison of the three strategies.
11.2. Compaction force
One goal during manufacturing is to ensure that the gripper applies the patches correctly: compaction pressure should be applied on the full patch surface. The behavior is influenced by two parameters: the patch geometry derived gripper depth and the manufacturing parameter gripper push-in.
The gripper depth is automatically calculated per patch and should not be modified by the user.
The gripper depth simplifies the application of a user-defined push-in, by making the push-in basically a constant for slightly curved surfaces.
Both parameters are described in detail in the following sections.
11.2.1. Gripper depth
The reference point for the application of a patch is always the patch center point. No additional data is needed for concave surfaces, since the patch center point will in this case always be touched last by the gripper. For convex-shaped surfaces an algorithm must calculate an additional offset distance. In Patch Artist the surface underneath each patch is automatically analyzed. The following figure shows how this so-called gripper depth is defined.

Fig. 11.1 Definition of gripper depth
A reference plane through the patch center point and orthogonal to the patch normal is constructed. For multiple sampling points on the patch surface the distance to this plane is calculated. The highest distance between a sampling point and the reference plane determines the required push-in that is needed to get the whole patch in contact with the surface.
The resulting value can be checked and modified in the patch property editor:
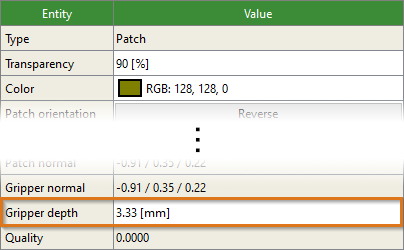
Note
Since the orientation of the reference plane depends on the vector along which the gripper is applied, an update of the Direct push-in orientation will cause an update of the gripper depth. Don’t forget to manually update your corresponding machine data patch afterwards, in case you’ve already created a machine data set.
11.2.2. Gripper push-in
The above mentioned gripper depth is not to be confused with the additional push-in on top of the gripper depth that should be specified for manufacturing. The left side of the next figure shows the application of a patch with a push-in of 0.0 mm - i.e. only the automatically calculated gripper depth is applied. The depicted rectangular gripper bounding box only slightly touches the deepest point of the patch. Usually additional force is necessary to consolidate the patch - as shown on the right. The consolidation pressure can be influenced using the push-in parameter.

Fig. 11.2 Definition of gripper push-in
The settings for the push-in can either be modified globally in the machine config settings or per patch using the Modify patch dialog.
This dialog is accessible via the context menu of the machine data patch.
Warning
The settings mentioned can be used to roughly adjust compaction pressure. They do not take gripper or patch deformation into account. Special care should be taken in case of (locally) high compression. When in doubt, start the step-through process with a low or even negative gripper push-in.
11.3. Direct push-in orientation
While working in Motion Artist, you might encounter patches that cannot be applied with the default orientation, for example, because the gripper would collide with the preforming tool. In such cases, it is often sufficient to adjust the axis along which the patch is applied by a few degrees.
You can modify the orientation of the normal vector for an individual patch or a group of patches. This defines the gripper’s push-in direction, used only if no additional placement contact points are defined (see Rolling placement contact points and Separate placement contact points).
Right-click on a patch (or a group of selected patches) and choose
Change placement contact strategy from the context menu.
For direct placement, use the Rotation X and Rotation Y fields to rotate the patch orientation:
X rotation: around axis parallel to the patch orientation
Y rotation: around axis perpendicular to the patch orientation
Note
Make sure that Show orientation is enabled in the ribbon bar to show blue arrows that indicate the adjusted orientation.
You can also click Make prediction to automatically calculate orientation values based on gripper size.
Note
Interaction with the 3D view (e.g., to change camera angle) is allowed while the dialog is open. However, avoid changing the patch selection - the dialog will still apply changes only to the patches selected when it was first opened. You can verify the affected elements in the Selected items tab.
If any of the selected patches already have rolling or separate placement contact points defined,
orientation adjustment is disabled to avoid accidental data loss. However, you can use the Reset all button
in the Selected items tab to clear both orientation adjustments and all contact points for the selected patches.
After resetting, reopen the dialog to define a new orientation.
If a dataset has already been generated in Motion Artist, any modifications to the patch orientation require you to either recreate the dataset or manually update the affected data-set patches.
11.4. Rolling placement contact points
11.4.1. Adding and modifying
For patches on complex surfaces, one simple push-in movement may not suffice. For example, the edges of a patch may fail to make proper contact with the surface. The image below illustrates this issue:
By defining rolling placement contact points, you can guide the gripper to press different zones of the patch in different directions during placement.
Note
Not all production systems support rolling contact points. A 6-axis picker robot is required. Confirm hardware compatibility before using this feature.
Rolling contact points can be defined for exactly one selected patch, and only after it has been draped (see Draping). To define them:
Select the patch.
Right-click and choose
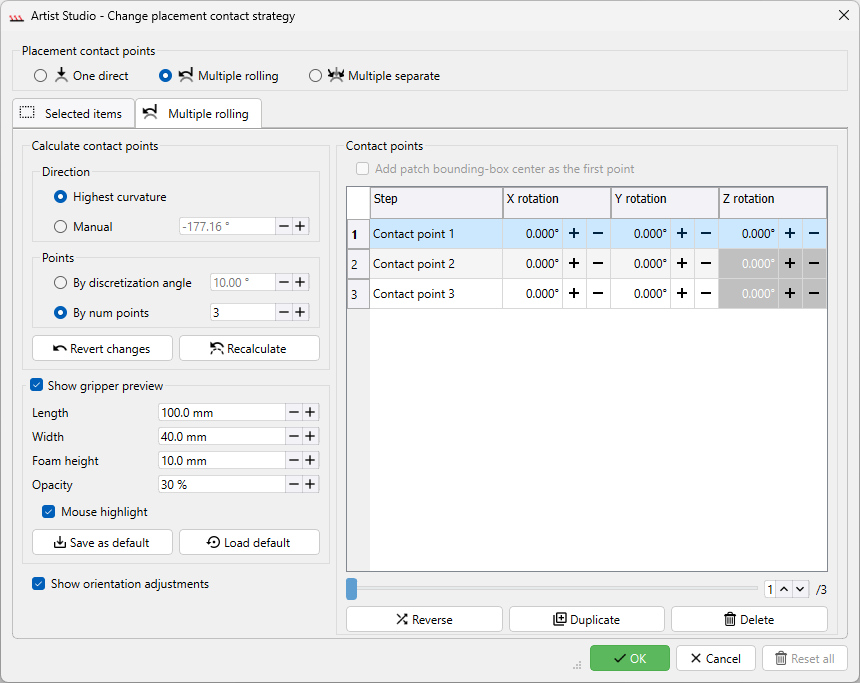
Change placement contact strategy.In the dialog, choose the
Multiple rollingplacement contact points radio button.
Press Alt to see keyboard shortcuts for all widgets.
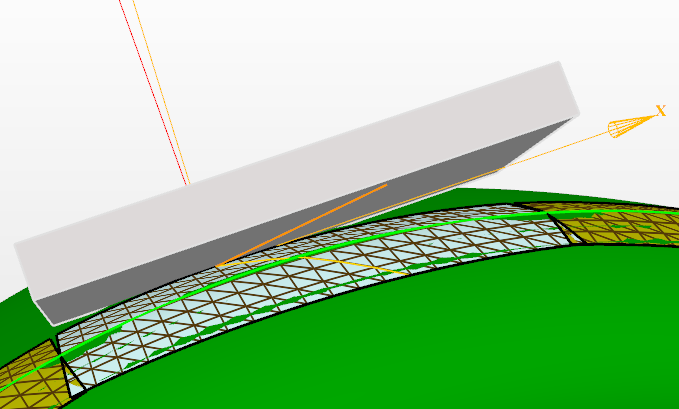
All generated contact points lie along a single line. By default, the line with the highest curvature is used, but you can manually adjust the direction (0° = patch direction). Preview shows:
Dark-orange line: contact points on the gripper
Light-orange line: corresponding points on the surface
You can control the number of contact points using:
Discretization angle (default: 5°) — smaller angles yield more points
Number of points — explicit count
Each contact point has adjustable orientation:
X rotation: around axis parallel to gripper’s default orientation
Y rotation: around axis perpendicular to gripper’s orientation
Note
Since during entire Target → Rolling → Rolling movement gripper is in contact with an incompletely placed patch, no Z rotations (around surface normal) are allowed.
The following visualization shows:
Orange coordinate system: initial orientation (XY plane tangent to the surface)
Red coordinate system: final orientation after adjustments
The red box shows the gripper’s final position at the selected contact point
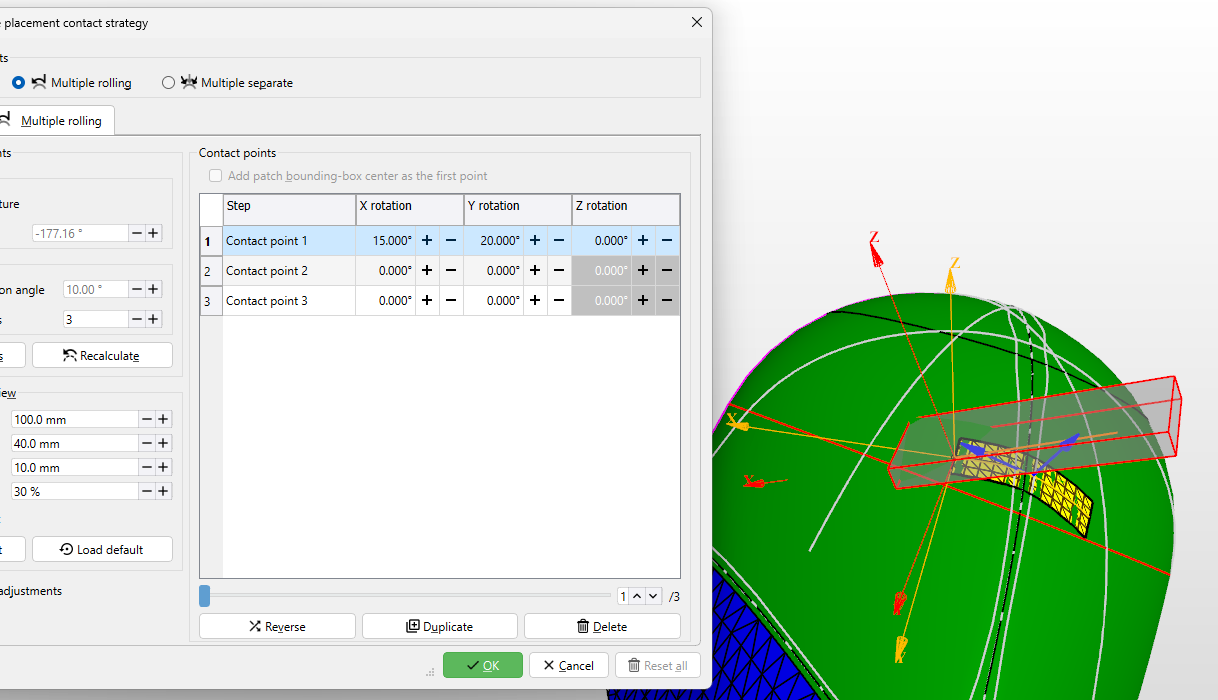
Rotation tip: Adjust X rotation first to position the Y-axis as needed. Then adjust Y rotation. Adjusting X after Y affects both visible axes due to rotation order.
Managing contact points:
You cannot move the positions of contact points directly.
Instead, you can increase the number of points and delete any that are not needed.
To delete a point, select it and press the
Deletekey or click theDeletebutton.To duplicate a point (e.g., to change its orientation at the same position), select it and press the
Insertkey or click theDuplicatebutton.To reverse the contact point sequence, click the
Reversebutton.
The direction of the first contact point defines how the gripper moves towards the preforming tool. The direction of the last point defines how it moves away.
You can define up to 10 contact points per patch, but usually 2–3 are sufficient for rolling placement.
Note
Even if the gripper path looks nearly the same, more contact points result in slower production.
Switching back to One direct placement and accepting the dialog will remove all rolling contact points.
Note
You can change the 3D view while editing, but selection must remain unchanged. The dialog will continue to apply changes only to the patch selected when it was opened. Use the Selected items tab to confirm which patches will be affected.
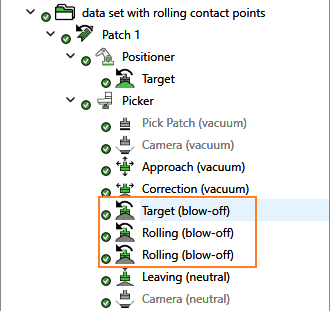
11.4.2. Movements in Motion Artist
For rolling placement, instead of a single Target movement (as in direct placement), Motion Artist generates one Target (the first rolling point from Patch Artist) plus one or more additional Rolling movements.
Note
If the foam is significantly deformed at the first contact point, placement precision may be reduced.
At all contact points, the gripper is pressed using the value of the push-in depth setting only. The gripper depth parameter from Patch Artist is not used.
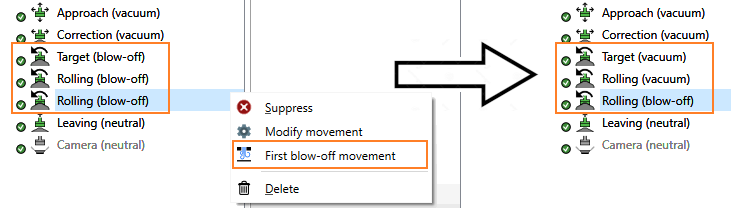
Depending on the patch size, surface shape, and material tackiness, you may need to manually choose a different rolling contact point as the first blow-off point.
Coming soon
For grippers with suction zones, dynamic adjustment of vacuum and blow-off during rolling movement will be supported.
The full sequence of rolling movements starts with a linear Approach → Correction → Target path, whose direction is determined by the first rolling point. Similarly, the leaving direction is determined by the last rolling point.
11.5. Separate placement contact points
Note
New in 25.1.4
11.5.1. Adding and modifying
Separate placement contact points are another strategy for placing patches on high-curvature surfaces. Unlike rolling contact points, which maintain continuous contact between the gripper and the preforming tool, the separate strategy moves the gripper away from the surface between contact points.
In the Patch Artist Change placement strategy dialog, you can preview only the contact points.
During dataset generation, additional approach/leaving movements are inserted automatically.
Though separate contact points may result in slower placement, they offer:
More precise application — avoids side effects of gripper deformation at first rolling point
Support for rotated gripper push-in — useful for sharp edges or tight surfaces
To define separate contact points:
Use the same dialog as for rolling contact points:
Change placement strategy.Choose the
Multiple separateplacement contact points radio button.
See Rolling placement contact points for detailed description of options in Change placement strategy dialog.
Compared to rolling contact points, for separate contact points:
Placement always starts at the point at the patch center, ensuring correct placement location.
Extra contact points are generated with 90° gripper rotation by default — this can be customized in the table.
11.5.2. Movements in Motion Artist
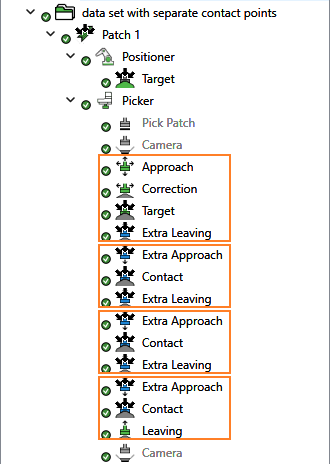
For separate contact points, instead of a single Target movement (as in direct placement), Motion Artist generates one Target plus one or more additional Contact movements. Between each pair of contact points, Motion Artist inserts one extra Leaving and one extra Approach movement:
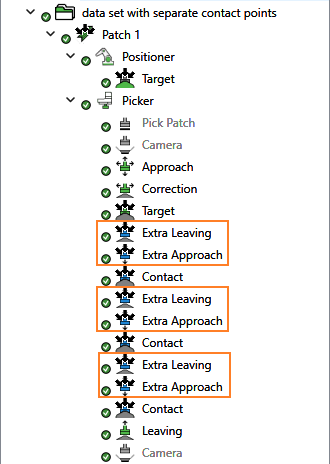
This results in separate groups of linear Approach → Contact → Leaving movements, each aligned along a direction determined by the X/Y/Z rotation at the corresponding contact point:
At all contact points, the gripper is pressed using the value of the push-in depth setting only. The gripper depth parameter from Patch Artist is not used.
Deposition is performed at the first contact point (Target). The patch is already placed on the tool afterward, with accuracy comparable to a direct placement.
Since the patch is fully deposited after the Target contact, subsequent contact points can apply a Z rotation (around the surface normal) without affecting patch placement:
11.6. Comparison: Direct – Rolling – Separate
Direct |
Rolling |
Separate |
|
|---|---|---|---|
Support |
All machines |
StepL, PV, 12-axis |
StepL, PV, 12-axis |
Data generation |
— by positioner position — by deposition frame |
— by positioner position |
— by positioner position |
Speed |
Fast (no extra movements) |
Moderate (only extra contact points) |
Slower (additional leaving / approach) |
Precision |
Very good |
Depends on foam deformation at first contact point |
Very good |
Risks |
For complex surfaces, compaction may not be enough to place the patch |
Additional leaving/approach directions and gripper rotations must be chosen carefully, especially for concave tools. Compared to rolling, higher risk of bridging or wrinkling because the patch is not stretched or kept under tension. |